





ปัจจุบันอุตสาหกรรมการเกษตรทั่วโลกกำลังเผชิญกับปัญหาการขาดแคลนแรงงานและต้นทุนค่าแรงที่พุ่งสูงขึ้น ซึ่งในพืชผลบางชนิด ต้นทุนด้านแรงงานอาจคิดเป็นสัดส่วนถึงเกือบ 50% ของค่าใช้จ่ายในการผลิตทั้งหมด ยิ่งไปกว่านั้น การเก็บเกี่ยวผลไม้และผักมีความท้าทายอย่างมาก โดยเฉพาะพืชที่บอบบางและช้ำง่ายอย่าง สตรอว์เบอร์รี ราสป์เบอร์รี และอะโวคาโด ซึ่งมีระยะเวลาเก็บเกี่ยวสั้น ทำให้เกษตรกรต้องสูญเสียผลผลิตไปมากถึง 25%
เพื่อแก้ไขปัญหาดังกล่าว ทีมนักวิจัยจากห้องปฏิบัติการ Robiotics Lab แห่งมหาวิทยาลัยเวสต์เวอร์จิเนีย (WVU) สหรัฐอเมริกา ได้พัฒนาหุ่นยนต์มือนิ่ม (Soft robotic hand) ที่สามารถเก็บเกี่ยวผลไม้ที่บอบบางได้อย่างมีประสิทธิภาพและช่วยลดความสูญเสีย
สรุปข่าว
ปัจจุบันอุตสาหกรรมการเกษตรทั่วโลกกำลังเผชิญกับปัญหาการขาดแคลนแรงงานและต้นทุนค่าแรงที่พุ่งสูงขึ้น ซึ่งในพืชผลบางชนิด ต้นทุนด้านแรงงานอาจคิดเป็นสัดส่วนถึงเกือบ 50% ของค่าใช้จ่ายในการผลิตทั้งหมด ยิ่งไปกว่านั้น การเก็บเกี่ยวผลไม้และผักมีความท้าทายอย่างมาก โดยเฉพาะพืชที่บอบบางและช้ำง่ายอย่าง สตรอว์เบอร์รี ราสป์เบอร์รี และอะโวคาโด ซึ่งมีระยะเวลาเก็บเกี่ยวสั้น ทำให้เกษตรกรต้องสูญเสียผลผลิตไปมากถึง 25%
เพื่อแก้ไขปัญหาดังกล่าว ทีมนักวิจัยจากห้องปฏิบัติการ Robiotics Lab แห่งมหาวิทยาลัยเวสต์เวอร์จิเนีย (WVU) สหรัฐอเมริกา ได้พัฒนาหุ่นยนต์มือนิ่ม (Soft robotic hand) ที่สามารถเก็บเกี่ยวผลไม้ที่บอบบางได้อย่างมีประสิทธิภาพและช่วยลดความสูญเสีย
การพัฒนาหุ่นยนต์การเกษตร
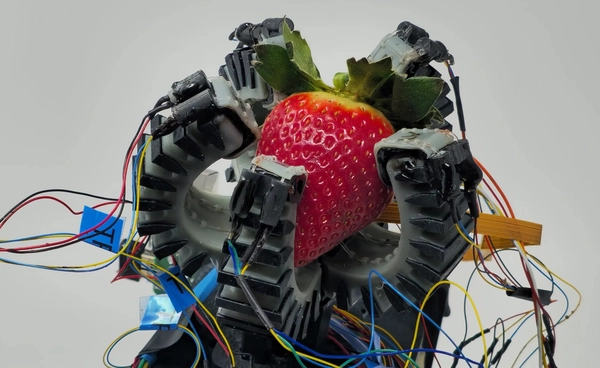
แม้ว่าหุ่นยนต์การเกษตรจะมีใช้งานมาสักระยะแล้ว แต่ส่วนใหญ่มักเป็นเครื่องจักรที่มีลักษณะแข็ง เทอะทะ จับวัตถุได้รุนแรง และขาดเซนเซอร์รับความรู้สึกสัมผัส ทางทีมวิจัยที่มุ่งเน้นการสร้างหุ่นยนต์เลียนแบบการเคลื่อนไหวของสัตว์ จึงได้ออกแบบมือนิ่มนี้โดยได้แรงบันดาลใจมาจากสรีระของปลาดาว หุ่นยนต์นี้มีนิ้วที่ยืดหยุ่น 5 นิ้ว ซึ่งผลิตขึ้นจากซิลิโคนและโพลียูรีเทน ทำให้สามารถจับผลไม้ได้อย่างอ่อนโยน
มือหุ่นยนต์รุ่นใหม่นี้ได้รับการติดตั้งกล้องขนาดจิ๋วเพื่อประเมินความสุกของผลไม้ด้วยภาพ แต่เนื่องจากการประเมินด้วยสายตาอาจไม่แม่นยำเสมอไป โดยเฉพาะกับผลไม้เช่น อะโวคาโด ที่มนุษย์มักจะต้องใช้วิธีบีบเบาๆ เพื่อทดสอบความสุก ทีมนักวิจัยจึงต้องก้าวข้ามความท้าทายนี้ด้วยการสอนให้หุ่นยนต์รู้จักการสัมผัส
ด้วยเหตุนี้ นิ้วของหุ่นยนต์จึงไม่ได้มีแค่ความนุ่มและยืดหยุ่น แต่ยังติดตั้งเซนเซอร์ใยแก้วนำแสงสีแดง (Red light optical fiber sensors) ที่ตรวจจับความโค้งของนิ้วเพื่อใช้ประเมินความสุกผ่านการสัมผัสได้ เซนเซอร์เหล่านี้จะช่วยให้หุ่นยนต์สามารถบีบผลไม้ด้วยแรงที่พอดีเพื่อตรวจสอบความแข็งโดยไม่ทำให้ผลไม้เละเสียหาย
นอกจากนี้ เซนเซอร์ยังสามารถตรวจจับได้ว่าหุ่นยนต์จับผลไม้ได้แน่นพอหรือไม่ และหากจับได้ไม่แน่นพอ หุ่นยนต์จะปรับแรงกดโดยอัตโนมัติเพื่อป้องกันผลไม้หลุดร่วง
ผลการทดสอบพบว่าประสบความสำเร็จโดยเซนเซอร์ของมือหุ่นยนต์สามารถคาดการณ์รูปทรงของผลไม้ได้ด้วยความแม่นยำเกือบ 100% ตัวต้นแบบของหุ่นยนต์มือนิ่มมีน้ำหนักไม่ถึง 65 กรัม สามารถกางออกและหุบเข้าได้ในเวลาไม่ถึง 2 วินาที สามารถยกวัตถุที่มีน้ำหนักสูงสุดถึง 1 กิโลกรัม หรือ 2.2 ปอนด์
ต้นแบบยังอยู่ในช่วงปรับขยายขนาดมือหุ่นยนต์ให้ใหญ่ขึ้น โดยตั้งเป้าที่จะนำไปใช้งานจริงในแปลงเกษตรภายใน 2 ถึง 4 ปีข้างหน้า นอกจากวงการเกษตรกรรมแล้ว ทีมวิจัยยังมุ่งหวังว่าเทคโนโลยีระบบหุ่นยนต์นิ่มลักษณะนี้ จะสามารถนำไปประยุกต์ใช้ในด้านอื่น ๆ ได้อีกอย่างกว้างขวาง เช่น ภารกิจสำรวจอวกาศ การสำรวจใต้น้ำ และในวงการการแพทย์ รายงานการศึกษาวิจัยชิ้นนี้เพิ่งได้รับการตีพิมพ์ในวารสารวิชาการ Nature Communications เมื่อวันที่ 23 มีนาคม 2026
- AI ช่วยให้งานง่ายขึ้น แต่ทำไมเรายังเหนื่อย? รู้จัก AI Brain Fry ภาวะสมองล้าจากการใช้ AI มากเกินไป
- HKEX ปั้นดัชนีใหม่ รับเมกะเทรนด์ AI ปลุกตลาดหุ้นฮ่องกง
- “Data Center” บูมใน “ออสเตรเลีย” ขุมพลังไอที หรือระเบิดเวลาเศรษฐกิจ ?
- เปิดลิสต์ 10 "เทคโนโลยี" ดาวรุ่ง รากฐานเศรษฐกิจยุคใหม่
- ไทยมีจุดแข็งด้านการตรวจจับ "บัญชีม้า"
ที่มาข้อมูล : newatlas, West Virginia University, Nature Communications
ที่มารูปภาพ : newatlas, West Virginia University, Nature Communications
