





วันที่ 18 มิถุนายนที่ผ่านมา องค์การบริหารการบินและอวกาศแห่งชาติ (NASA) ร่วมกับห้องปฏิบัติการ Jet Propulsion Laboratory (JPL) เปิดเผยการทดสอบหุ่นยนต์สำรวจต้นแบบรุ่นใหม่ที่มีชื่อว่า ERNEST (Exploration Rover for Navigating Extreme Sloped Terrain) ซึ่งถูกพัฒนาขึ้นเพื่อก้าวข้ามข้อจำกัดของหุ่นยนต์สำรวจดาวอังคารรุ่นปัจจุบัน โดยมาพร้อมความคล่องตัวที่เหนือกว่า ระบบกันสะเทือนล้ำสมัย และระบบปัญญาประดิษฐ์ (AI) ที่ช่วยให้หุ่นยนต์สำรวจขับเคลื่อนและตัดสินใจได้ด้วยตนเอง
สรุปข่าว
วันที่ 18 มิถุนายนที่ผ่านมา องค์การบริหารการบินและอวกาศแห่งชาติ (NASA) ร่วมกับห้องปฏิบัติการ Jet Propulsion Laboratory (JPL) เปิดเผยการทดสอบหุ่นยนต์สำรวจต้นแบบรุ่นใหม่ที่มีชื่อว่า ERNEST (Exploration Rover for Navigating Extreme Sloped Terrain) ซึ่งถูกพัฒนาขึ้นเพื่อก้าวข้ามข้อจำกัดของหุ่นยนต์สำรวจดาวอังคารรุ่นปัจจุบัน โดยมาพร้อมความคล่องตัวที่เหนือกว่า ระบบกันสะเทือนล้ำสมัย และระบบปัญญาประดิษฐ์ (AI) ที่ช่วยให้หุ่นยนต์สำรวจขับเคลื่อนและตัดสินใจได้ด้วยตนเอง
ข้อจำกัดของหุ่นยนต์สำรวจรุ่นปัจจุบัน
หุ่นยนต์สำรวจดาวอังคารของ NASA นับตั้งแต่ช่วงปลายยุค 90 จนถึงหุ่นยนต์สำรวจตัวท็อปรุ่นล่าสุดอย่าง Perseverance แม้จะสร้างผลงานมากมาย แต่ก็ยังมีจุดอ่อนในเรื่องความเร็วโดยทำความเร็วสูงสุดบนพื้นราบได้เพียงไม่ถึง 0.1 ไมล์ต่อชั่วโมง หรือ 161 เมตรต่อชั่วโมง
นอกจากนี้ สภาพพื้นผิวที่ขรุขระ ทางลาดชัน หิน และทราย ยังสร้างความเสียหายต่อล้อของหุ่นยนต์สำรวจและทำให้ต้องใช้เวลาขับอ้อมเป็นระยะทางไกลเพื่อไปให้ถึงจุดหมาย
รู้จักกับ ERNEST ต้นแบบหุ่นยนต์สำรวจดีไซน์ใหม่
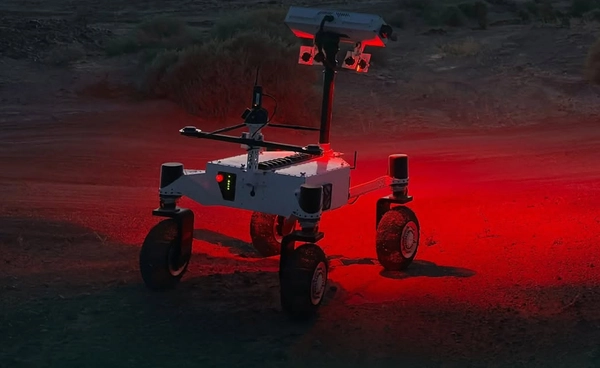
ต้นแบบหุ่นยนต์สำรวจ ERNEST ขับลเคลื่อน 4 ล้อ ต่างจากหุ่นยนต์สำรวจดาวอังคารรุ่นปัจจุบันที่ใช้ 6 ล้อ มีความยาว 4 ฟุต โดยถูกวางแผนไว้ว่าหากถูกนำไปใช้ในภารกิจจริง หุ่นยนต์สำรวจจะมีขนาดใหญ่กว่ารุ่นต้นแบบนี้ถึง 2 เท่า โดยรุ่นนี้มีการติดตั้งส่วนหัวทรงสี่เหลี่ยมไว้บนเสาสูง 4.5 ฟุต
ความสามารถที่โดดเด่นที่สุดของ ERNEST คือ ระบบกันสะเทือนแบบแอคทีฟ (Active Suspension) ซึ่งต่างจากระบบ Rocker-Bogie แบบดั้งเดิมที่ใช้มานานกว่า 30 ปี และมีความสามารถเด่น ๆ เช่น
1. หุ่นยนต์สามารถยกแต่ละล้อขึ้นอย่างเป็นอิสระเพื่อก้าวเหยียบหรือข้ามสิ่งกีดขวางได้
2. การขับเคลื่อนที่หลากหลายสามารถเคลื่อนที่ด้วยท่าทางแปลกใหม่ เช่น การเลื้อย (squirming) การเดินด้วยล้อ (wheel-walking) และการปีนป่าย
3. ขับเคลื่อนได้ทุกทิศทาง โดยล้อทั้ง 4 สามารถบังคับเลี้ยวได้อย่างอิสระ ทำให้หุ่นยนต์สามารถขับไปได้ในทุกทิศทาง แม้กระทั่งการเคลื่อนที่ไปด้านข้าง
4. หุ่นยนต์ติดตั้งกลไกคลัตช์ที่สามารถสลับกลับไปใช้ระบบกันสะเทือนแบบพาสซีฟ (Passive Suspension) ได้ในสถานการณ์ที่ต้องการประหยัดพลังงาน
การทำงานร่วมกับ AI และการเรียนรู้ด้วยตนเอง
ในเวอร์ชันล่าสุด ERNEST ได้รับการอัปเกรดให้มีความสามารถในการตัดสินใจอย่างอิสระ ทีมงานใช้ระบบปัญญาประดิษฐ์ประเภท Reinforcement Learning เพื่อฝึกให้หุ่นยนต์เรียนรู้การทำงานด้วยตัวเองผ่านเครื่องจำลองสภาพแวดล้อมเสมือนจริงที่มีความละเอียดสูง เมื่อผ่านการฝึกฝน หุ่นยนต์ถูกนำมาทดสอบจริงที่ลาน Mars Yard ของห้องวิจัย JPL ซึ่งเต็มไปด้วยเนินทราย กองหิน พื้นยกระดับ และทางลาดชัน
โดย ERNEST สามารถประเมินพื้นผิว อัลกอริทึมในการข้ามอุปสรรค และหาเส้นทางที่ปลอดภัยได้ด้วยตัวเองโดยไม่ต้องรอคำสั่งจากมนุษย์แบบจอยสติ๊ก และในช่วงเดือนมีนาคม 2026 ทีมงานได้นำ ERNEST ไปทดสอบภาคสนามที่ทะเลทรายโคโลราโด รัฐแคลิฟอร์เนียตอนใต้
ผลการทดสอบพบว่าหุ่นยนต์ขับเคลื่อนเป็นระยะทางกว่า 16 ไมล์ ภายในเวลา 37 ชั่วโมงตลอดช่วงเวลา 7 วัน ทำความเร็วสูงสุดได้ที่ 0.6 ไมล์ต่อชั่วโมง หรือ 0.9656 กิโลเมตรต่อชั่วโมง
ทีมงานได้ทดสอบหุ่นยนต์ในทุกช่วงเวลา ทั้งรุ่งเช้า พลบค่ำ และกลางคืน เพื่อจำลองสภาพแสงและเงาที่ทอดยาวแบบเดียวกับพื้นที่ขั้วของดวงจันทร์
โครงการ ERNEST เริ่มต้นพัฒนามาตั้งแต่ปี 2022 โดยผ่านการทดสอบรูปแบบระบบกันสะเทือนมาแล้วถึง 11 รูปแบบ เป้าหมายสูงสุดของ NASA คือ การนำเทคโนโลยีนี้ไปใช้กับภารกิจสำรวจพื้นที่ทุรกันดารหรือภูมิประเทศที่ยากลำบากบนดวงจันทร์และดาวอังคาร ซึ่งหุ่นยนต์สำรวจรุ่นก่อนๆ ไม่สามารถเข้าถึงได้ เพื่อให้หุ่นยนต์สามารถเดินทางได้ไกลขึ้น เร็วขึ้น และพึ่งพาการควบคุมจากศูนย์บนโลกน้อยลงในอนาคต
- NASA เปิดสนามแข่งยานสำรวจดวงจันทร์ ปั้นวิศวกรอวกาศรุ่นใหม่
- NASA สั่งนักบินอวกาศหลบภัยใน SpaceX Dragon หลัง ISS รั่ว ก่อนยกเลิกคำสั่งและกลับมาทำงานตามปกติ
- NASA สร้างประวัติศาสตร์ X-59 บินเหนือเสียงครั้งแรก ไร้โซนิคบูม
- Dolby Atmos พลิกประสบการณ์เสียง สู่มิติใหม่แห่งความบันเทิงและการเล่นเกม
- หุ่นยนต์ตัวกะปิ-โดรนดอกแดนดิไลออน เตรียมบุกอุโมงค์ลาวาใต้ดาวอังคาร
