





จีนโชว์นวัตกรรมพลิกโฉมการเกษตรกรรมแบบดั้งเดิม ด้วยการพัฒนาหุ่นยนต์อัจฉริยะรุ่นต้นแบบ ที่ได้เริ่มลงสนามทดสอบระบบช่วยห่อถุงป้องกันให้กับผลแอปเปิลวัยอ่อน ณ สวนผลไม้ในเมืองเหยียนไท่ มณฑลซานตง ซึ่งถือเป็นหนึ่งในภูมิภาคที่ปลูกแอปเปิลที่ใหญ่ที่สุดของประเทศ
สรุปข่าว
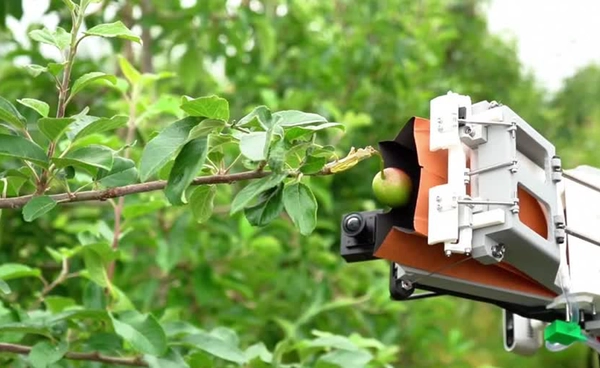
จีนโชว์นวัตกรรมพลิกโฉมการเกษตรกรรมแบบดั้งเดิม ด้วยการพัฒนาหุ่นยนต์อัจฉริยะรุ่นต้นแบบ ที่ได้เริ่มลงสนามทดสอบระบบช่วยห่อถุงป้องกันให้กับผลแอปเปิลวัยอ่อน ณ สวนผลไม้ในเมืองเหยียนไท่ มณฑลซานตง ซึ่งถือเป็นหนึ่งในภูมิภาคที่ปลูกแอปเปิลที่ใหญ่ที่สุดของประเทศ
หุ่นยนต์สุดล้ำนี้เกิดจากความร่วมมือระหว่างมหาวิทยาลัยเซาท์อีสต์ (Southeast University) และบริษัทเทคโนโลยีชั้นนำ โดยตัวหุ่นยนต์ได้ผสานเทคโนโลยีระบบคอมพิวเตอร์วิทัศน์ (Computer Vision) เข้ากับระบบกลไกอัจฉริยะ เพื่อเปลี่ยนขั้นตอนการห่อถุงแอปเปิล ที่เคยต้องพึ่งพาแรงงานคนทั้งหมดให้กลายเป็นระบบอัตโนมัติ
สำหรับการห่อถุงผลแอปเปิล นับเป็นกรรมวิธีสำคัญที่เกษตรกรนิยมใช้เพื่อยกระดับคุณภาพผิวของผลผลิต ให้มีความสวยงาม สม่ำเสมอ และยังช่วยป้องกันแมลงศัตรูพืชและโรคระบาด โดยลดการใช้สารเคมี
อย่างไรก็ตาม แม้จะเป็นขั้นตอนที่จำเป็น แต่กระบวนการนี้ใช้แรงงานสูงมาก และกำลังเผชิญหน้ากับความท้าทายครั้งใหญ่ในปัจจุบัน ไม่ว่าจะเป็นภาวะขาดแคลนแรงงาน ค่าจ้างที่พุ่งสูงขึ้น ตลอดจนความยากในการควบคุมมาตรฐานการห่อของคนงานแต่ละคนให้เหมือนกัน
ด้วยเหตุนี้จึงได้มีการพัฒนาหุ่นยนต์ต้นแบบที่จะช่วยห่อถุงแอปเปิลเกิดขึ้น โดยทีมวิจัยเปิดเผยว่า หุ่นยนต์ตัวนี้ได้รับการออกแบบมาให้สามารถเคลื่อนที่และทำงานได้ด้วยตัวเองอย่างอิสระภายในสวน โดยตั้งเป้าความเร็วในการทำงานไว้ที่ 600 ใบต่อชั่วโมง ต่อหนึ่งแขนกล
แม้ในปัจจุบันตัวหุ่นยนต์จะสามารถทำงานตามขั้นตอนพื้นฐานได้สำเร็จลุล่วงแล้ว แต่ทีมวิจัยยังคงเดินหน้าทดสอบภาคสนามอย่างต่อเนื่อง เพื่อปรับปรุงความแม่นยำรวมถึงอัตราความสำเร็จในการห่อถุงให้เสถียรและมีประสิทธิภาพสูงสุด ก่อนจะนำมาใช้งานจริงในเชิงพาณิชย์ต่อไป
- เยอรมนีผุด “พนักงานหุ่นยนต์” ใช้ฮิวแมนนอยด์เป็นเพื่อนช่วยเลือกซื้อของ
- เผยโฉม “สมอง AI” ฝึก “หุ่นยนต์ฮิวแมนนอยด์” ทำงานได้ใน 48 ชั่วโมง
- 5 ทศวรรษ “แอปเปิล” สู่โจทย์หินยุค AI
- “Figure 3” บุกทำเนียบขาว “เมลาเนีย ทรัมป์” เปิดตัวหุ่นยนต์ AI พลิกโฉมการศึกษาเด็ก
- สตาร์ตอัปเคนยาทำ “แขนกลอัจฉริยะ” ช่วยเด็กสูญเสียการได้ยิน เรียน STEM ไร้ขีดจำกัด
ที่มาข้อมูล : reutersconnect.com
ที่มารูปภาพ : China News Service
