





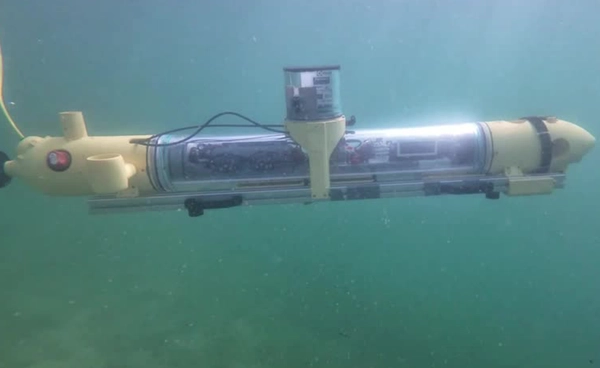
ทีมนักศึกษาจากมหาวิทยาลัย ETH Zurich ในประเทศสวิตเซอร์แลนด์ ได้พัฒนานวัตกรรมสุดล้ำอย่าง โพลาลิส (POLARIS) หุ่นยนต์ดำน้ำอัตโนมัติที่ออกแบบมาเพื่อปฏิบัติภารกิจใต้พื้นผิวเยือกแข็งของทะเลสาบ เพื่อตรวจวัดความหนาของชั้นน้ำแข็งจากด้านล่าง ซึ่งจะช่วยให้นักวิทยาศาสตร์ได้ข้อมูลสำคัญในการศึกษาการเปลี่ยนแปลงของสภาพภูมิอากาศในพื้นที่เยือกแข็ง
สรุปข่าว
ทีมนักศึกษาจากมหาวิทยาลัย ETH Zurich ในประเทศสวิตเซอร์แลนด์ ได้พัฒนานวัตกรรมสุดล้ำอย่าง โพลาลิส (POLARIS) หุ่นยนต์ดำน้ำอัตโนมัติที่ออกแบบมาเพื่อปฏิบัติภารกิจใต้พื้นผิวเยือกแข็งของทะเลสาบ เพื่อตรวจวัดความหนาของชั้นน้ำแข็งจากด้านล่าง ซึ่งจะช่วยให้นักวิทยาศาสตร์ได้ข้อมูลสำคัญในการศึกษาการเปลี่ยนแปลงของสภาพภูมิอากาศในพื้นที่เยือกแข็ง
ข้อดีของเจ้าหุ่นยนต์ โพลาลิส (POLARIS) คือความสามารถในการเก็บข้อมูลในพื้นที่ที่ยากลำบาก เสี่ยงอันตราย หรือใช้เวลานานเกินไปหากใช้มนุษย์เดินเท้าเข้าไปสำรวจ ซึ่งปกติต้องใช้เวลาในการเฝ้าสังเกตการณ์น้ำแข็งตลอดทั้งฤดูกาล ตั้งแต่ช่วงเริ่มต้นที่น้ำแข็งยังบางมาก ไปจนถึงช่วงปลายฤดูกาลที่โครงสร้างของน้ำแข็งเริ่มไม่ปลอดภัย ดังนั้น การใช้หุ่นยนต์เข้าไปวัดความหนาจากใต้น้ำแข็งจึงเป็นทางเลือกที่ดีและปลอดภัยที่สุด
ในปัจจุบัน วิธีการวัดความหนาของน้ำแข็งยังมีข้อจำกัดอยู่มาก หากเป็นการสำรวจระยะไกล (Remote Sensing) เช่น การใช้ดาวเทียม มักจะประสบปัญหาในการวิเคราะห์ความหนาของน้ำแข็งในทะเลสาบขนาดเล็กแถบเทือกเขาแอลป์ ส่วนการเจาะสำรวจด้วยมนุษย์ (Manual Drilling) เป็นการเจาะสุ่มตรวจเฉพาะบางจุด ซึ่งไม่สามารถเห็นภาพรวมทั้งหมดได้และมีความเสี่ยงสูง
โพลาลิส (POLARIS) จึงถูกสร้างขึ้นมาเพื่ออุดรอยรั่วเหล่านี้ โดยมันจะสร้างแผนที่ความหนาของน้ำแข็งที่ละเอียดกว่ามาก ทีมวิจัยยืนยันว่ามันให้ผลลัพธ์ที่สม่ำเสมอและแม่นยำกว่าดาวเทียมอย่างเห็นได้ชัด สามารถกำหนดจุดเฉพาะเจาะจงที่ต้องการวัด หรือจะปล่อยให้มันวิ่งเก็บข้อมูลอย่างต่อเนื่องเพื่อสแกนภูมิประเทศของพื้นผิวน้ำแข็งจากด้านล่างทั้งหมดก็ทำได้
กลไกการทำงานของหุ่นยนต์ ออกแบบให้เคลื่อนที่ใต้น้ำแข็งอย่างอิสระ สามารถนำทางไปยังจุดที่กำหนด และเชื่อมโยงข้อมูลการวัดเข้ากับพิกัดตำแหน่งได้อย่างแม่นยำ
โดยมีโหมดการวัดความหนา 2 รูปแบบหลัก ๆ คือ โหมดสัมผัสผิวน้ำแข็งโดยตรง (Touching Mode) เป็นโหมดที่แม่นยำที่สุด โดยหุ่นยนต์จะแนบตัวกับท้องน้ำแข็งและใช้เซนเซอร์วัดแรงดันเพื่อคำนวณระดับความลึก จากนั้นจะนำไปคำนวณหาความหนาของน้ำแข็งร่วมกับค่าความหนาแน่น
และโหมดล่องใต้ชั้นน้ำแข็ง (Cruising Mode) ที่หุ่นยนต์จะเคลื่อนที่ไปเรื่อย ๆ ใต้น้ำแข็งและใช้ระบบโซนาร์ (Sonar) ยิงวัดระยะห่างระหว่างตัวหุ่นยนต์กับผิวน้ำแข็ง ทำให้สามารถเก็บข้อมูลได้อย่างต่อเนื่องไม่ขาดตอน
เป้าหมายสูงสุดของทีมพัฒนาคือการบรรลุความแม่นยำในการวัดในระดับเซนติเมตร โดยได้เริ่มทดสอบระบบในทะเลสาบแถบเทือกเขาแอลป์ รวมถึงทะเลสาบเซนต์มอริตซ์ (Lake St. Moritz) และทะเลสาบธารน้ำแข็งเธโอดุล (Theodul Glacier Lake)
หากโครงการนี้ประสบความสำเร็จ โพลาลิส (POLARIS) จะกลายเป็นเครื่องมือชิ้นสำคัญที่ช่วยให้ทั้งนักวิจัยและหน่วยงานท้องถิ่น สามารถประเมินความปลอดภัยของกิจกรรมฤดูหนาวบนทะเลสาบ และติดตามการเปลี่ยนแปลงของภูมิทัศน์น้ำแข็งท่ามกลางวิกฤตสภาวะภูมิอากาศเปลี่ยนแปลงได้อย่างมีประสิทธิภาพและปลอดภัยที่สุด
- NATO ทดสอบเทคโนโลยีโดรน รับมือภัยคุกคามใหม่ในน่านน้ำยุโรป
- หุ่นยนต์ขาแมงมุม ออกแบบมาเพื่อสำรวจถ้ำบนดาวอังคาร
- เปิดตัว Stripe แพลตฟอร์มโครงสร้างทางการเงินที่จะมาช่วยการเติบโตของธุรกิจออนไลน์ในประเทศไทย
- รู้จักดาวเทียมธีออส 2 เอ (THEOS 2A) ดาวเทียมสำรวจโลกฝีมือคนไทย
- นาซาทดสอบ SHIELD เทคโนโลยีลงจอดบนดาวอังคารแบบใหม่
ที่มาข้อมูล : reutersconnect.com
ที่มารูปภาพ : REUTERS / JAAP OUDMAN/ETH ZURICH / ETH ZURICH
